
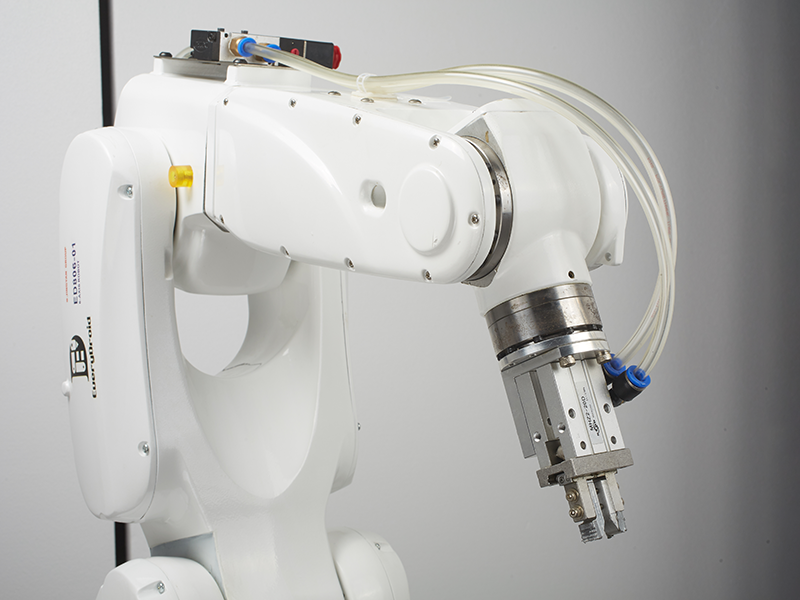
現(xiàn)在很多現(xiàn)代化的工廠里面的生產(chǎn)線上都有機械臂,而相對與一些要加工的原件的空間的位置和姿態(tài)變化較多的就必須得靠多軸多關(guān)節(jié)的機械臂才能完成。而目前的六軸工業(yè)機器人作為工業(yè)機器人中應(yīng)用中最為廣泛的類型,具有高靈活性、超大負載、高定位精度等眾多優(yōu)點。常見的六軸關(guān)節(jié)的機械臂,是通過六個伺服電機直接通過減速器、同步帶輪等驅(qū)動六個關(guān)節(jié)軸的旋轉(zhuǎn)。六軸工業(yè)機器人一般有六個自由度,常見的六軸工業(yè)機器人包含旋轉(zhuǎn)(S軸),下臂(L軸)、上臂(U軸)、手腕旋轉(zhuǎn)(R軸)、手腕擺動(B軸)和手腕回轉(zhuǎn)(T軸)。六個關(guān)節(jié)合成實現(xiàn)末端的六自由度動作。
六軸機械臂的特點主要有以下幾方面:
1)可編程:六軸工業(yè)機械臂最大特點是柔性啟動化,它可隨其工作環(huán)境變化以及加工件的變化進行再編程,適合于小批量多品種具有均衡高效率的柔性制造生產(chǎn)線的應(yīng)用。
2)擬人化:六軸工業(yè)機械臂結(jié)合機械臂與人的特點。在六軸工業(yè)機械臂的結(jié)構(gòu)設(shè)計讓它具備了類似人的行走、腰轉(zhuǎn)等部分功能;其傳感器更是使其提高對周圍環(huán)境的自適應(yīng)能力。
3}通用性:一般六軸工業(yè)機械臂在執(zhí)行不同的作業(yè)任務(wù)時比其他的專用型的工業(yè)機械臂具有更好的通用性。。
4)機電一體化:六軸工業(yè)機械臂是機械學(xué)和微電子學(xué)的結(jié)合。工業(yè)機械臂具有各種傳感器可以獲取外部環(huán)境信息,而且還具有記憶能力、語言理解能力、圖像識別能力、推理判斷能力等人工智能,這些都是微電子技術(shù)的應(yīng)用,特別是計算機技術(shù)的應(yīng)用密切相關(guān)。